








Didirikan pada tahun 2001, ini adalah perusahaan teknologi tinggi nasional yang mengintegrasikan penelitian dan pengembangan, produksi, penjualan, dan layanan purna jual.
CARI APA YANG ANDA INGINKAN
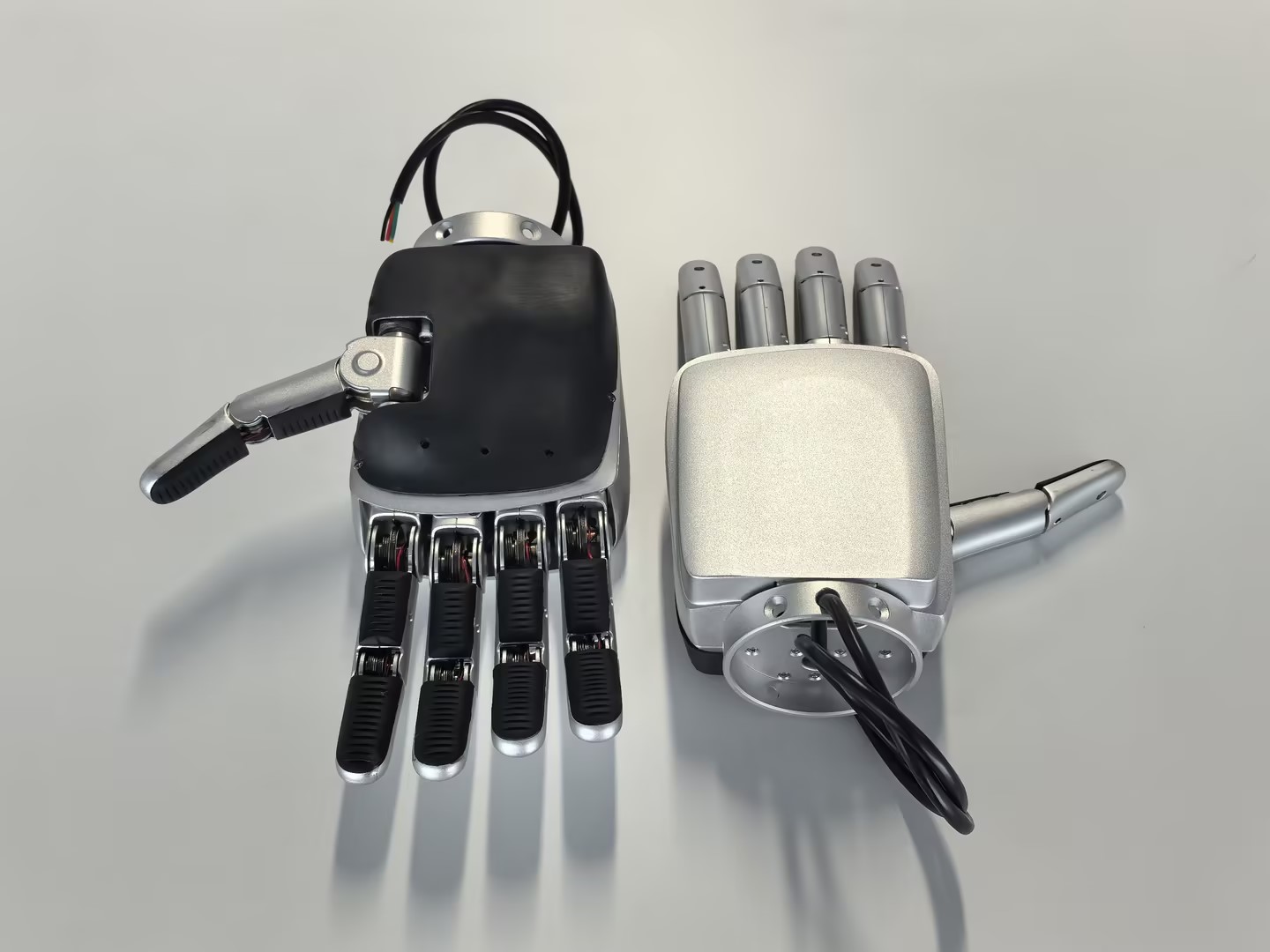
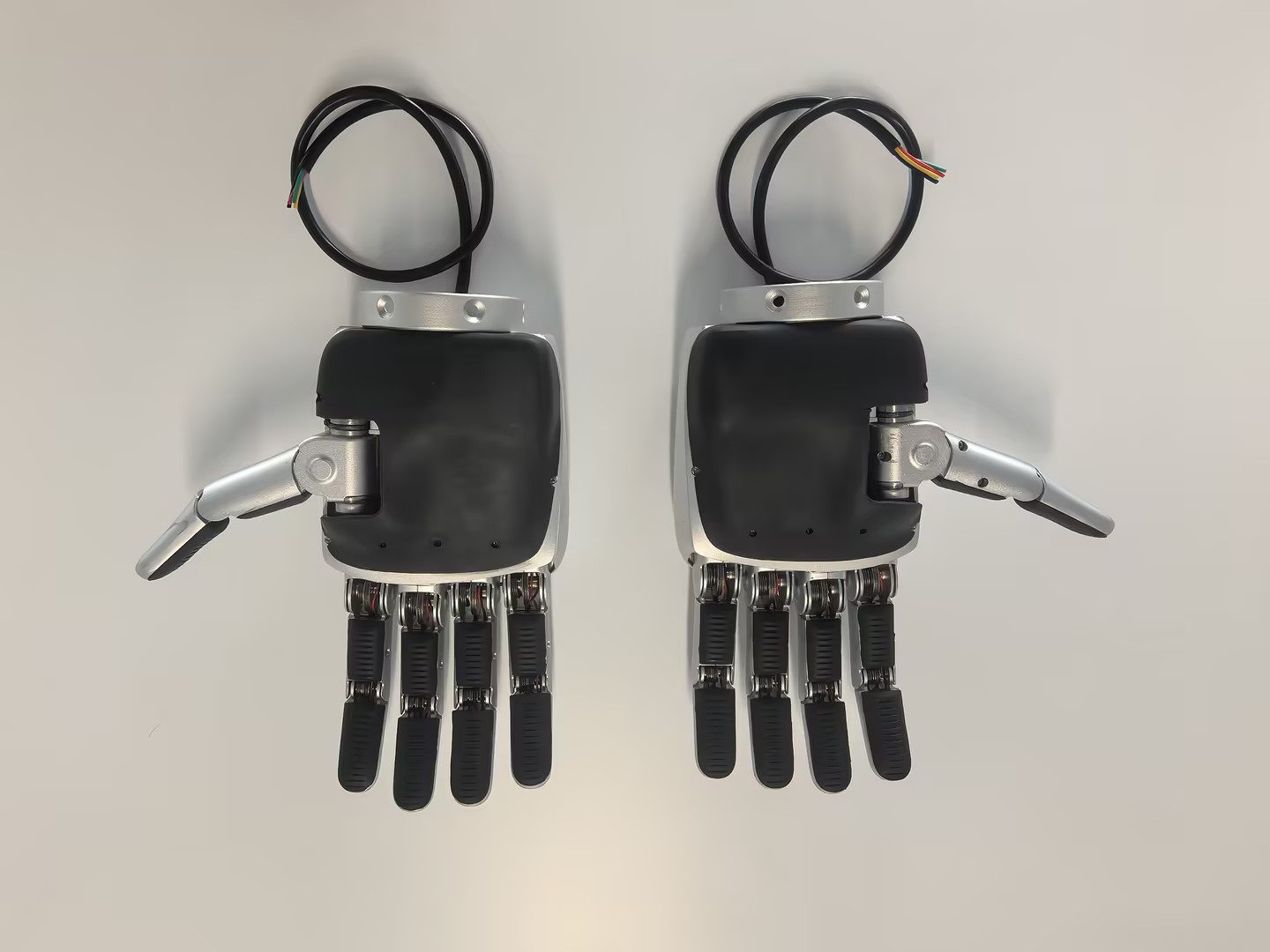
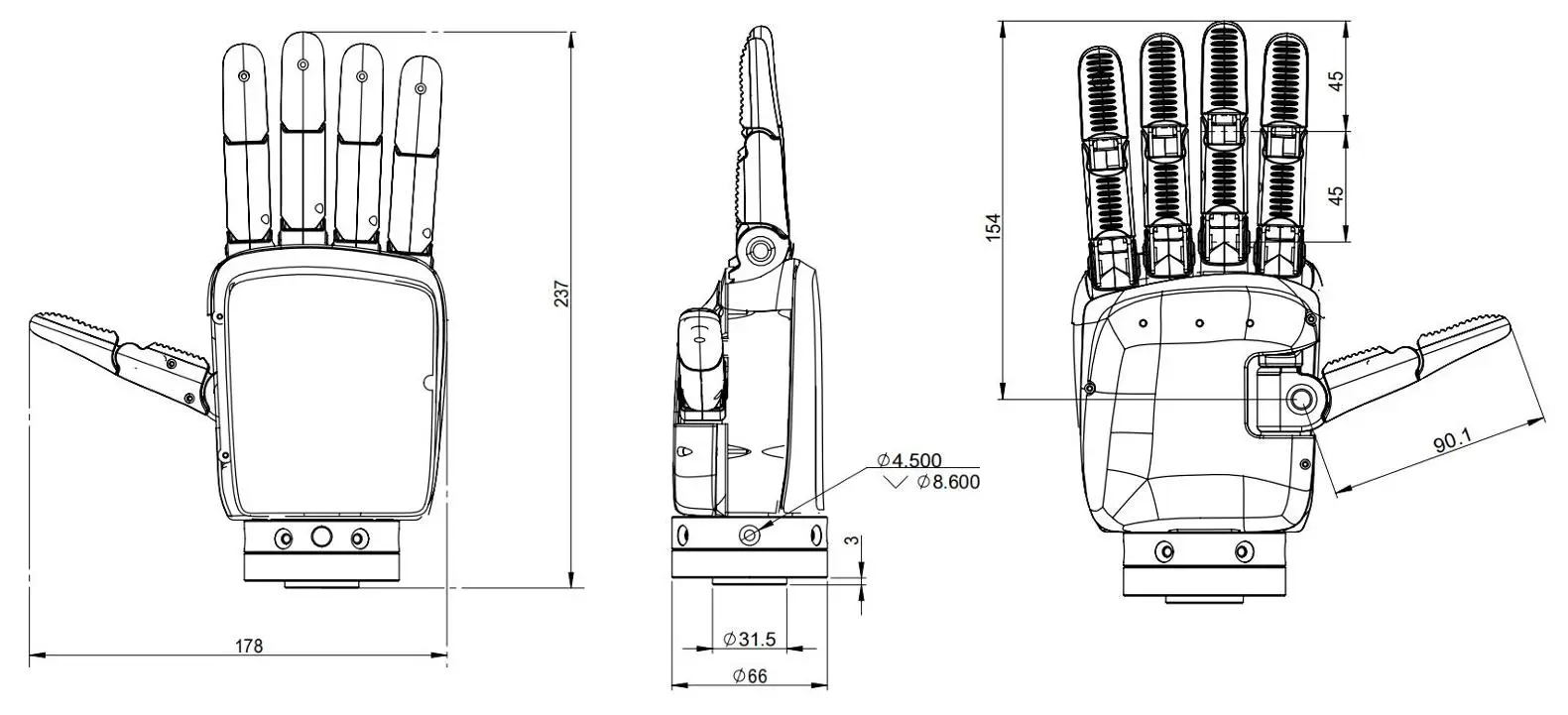
| LZ001 Industrial Dexterous Hand | |||
| Indeks Data | |||
| Jumlah Jari | 5 | Siklus Hidup | 1 Juta Siklus |
| Gelar Kebebasan | 11 | Sensor tekanan jari | Sepuluh |
| Jumlah Kendaraan | 6 | Didorong Kabel | |
| Resistensi Dampak Bersama | Mendukung | Tegangan Operasi | DC48V ± l0% |
| Berat bersih | 1.2kg | Operasi Saat Ini | 4A |
| Kekuatan Mencubit Maksimum | 10kg | Antarmuka Kontrol | Modbus485 / EtherCAT |
| LZ002 Industrial Dexterous Hand | |||
| Indeks Data | |||
| Jumlah Jari | 5 | Siklus Hidup | 1 Juta Siklus |
| Gelar Kebebasan | 15 | Sensor tekanan jari | Lima |
| Jumlah Kendaraan | 6 | Linkage Drive | |
| Waktu Mencengkeram | 0,3 detik | Tegangan Operasi | DC48V ± l0% |
| Berat bersih | 500g | Operasi Saat Ini | 2A |
| Kekuatan Maksimum | 3 kg | Antarmuka Kontrol | Modbus485 / EtherCAT |
| Sarung Tangan Data LZ010 | |||
| Indeks Data | |||
| Jumlah Sensor Flex / Sudut | 10 | Jumlah IMU | 6 |
| Resolusi Sudut | 0.01° | Rentang Akselerometer | ± 18 g |
| Akurasi Sikap | ≤ 0.5° | Antarmuka | USB dan Ethernet |
| Komunikasi Latensi | ≤ 20 ms | Berat Sarung Tangan | 100 ± 5 g |
| Integrasi Simulasi Mulus | mesin fisika seperti Mujoco dan Isaac Lab | Kit Pengembangan (SDK) untuk pengembangan kustom. | |
| Ekspor Data | Menyediakan antarmuka dan API plugin untuk alat pihak ketiga termasuk Unity, Unreal Engine (UE), dan MotionBuilder. | Pemutaran Data | Perangkat lunak ini mendukung pemutaran data, kueri, dan fungsi penyimpanan. Ini mendukung format data gerak standar termasuk BVH dan FBX, dan menyediakan Perangkat Lunak |
Didirikan pada tahun 2001, ini adalah perusahaan teknologi tinggi nasional yang mengintegrasikan penelitian dan pengembangan, produksi, penjualan, dan layanan purna jual.
Hak Cipta © 2024 Kailong Teknologi Tinggi Co., Ltd.
Dipersembahkan oleh iglobalwin.com